
第一作者:温烨烨
通讯作者:张锦
通讯单位:1. 北京大学纳米化学研究中心,北京分子科学国家研究中心,北京大学化学与分子工程学院;2. 北京石墨烯研究院
主要亮点
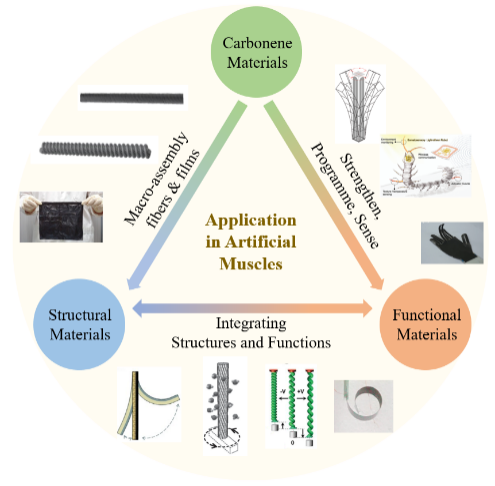
本文系统综述了以碳纳米管和石墨烯为代表的烯碳材料在人工肌肉领域的应用进展。分别从一维纤维和二维薄膜的烯碳人工肌肉宏观表现形态出发,介绍了既作为结构材料,又提供了响应、驱动功能的烯碳材料在人工肌肉中的应用;从机电性能、可编程的响应形变以及传感功能三个方向,介绍了烯碳材料作为增强赋能相在人工肌肉材料中的功能性应用。最后总结并展望了基于烯碳材料人工肌肉面临的机遇与挑战。
此综述是烯碳纤维与智能织物专刊邀请稿,客座编辑:北京大学张锦院士,浙江大学高超教授。

研究背景
人工肌肉是一类受外界刺激(光、电、热等)发生可逆响应形变的一类智能材料和系统,又称驱动器。随着包含物联网、人机交互界面、仿生机器人及智能穿戴等领域的发展,传统刚性驱动器已无法满足先进应用领域对人工肌肉柔性、轻质、具有环境适应性以及高的能量转换效率等新要求。因此需开发集响应、驱动、结构等功能为一体的人工肌肉材料。烯碳材料是指由sp2杂化碳原子组成的全碳材料,主要包括碳纳米管(CNT)和石墨烯。由于自身优异的力学性能、高比表面积、柔性及可加工的特性,烯碳材料可构筑成多维的组装材料,而突出的电学、热学和光学性能,又可赋予其组装材料多功能特性。因此,烯碳材料是结构-功能一体化材料的优秀构筑基元,在人工肌肉领域展现出了巨大的应用潜力。由烯碳材料构筑而成的人工肌肉的相关研究推动了该领域的重大发展。
核心内容
01 烯碳材料人工肌肉
目前学者已发展出诸多方法,例如阵列纺丝法、湿法纺丝法、限域水热法、薄膜加捻法、抽滤诱导自组装等,将烯碳材料可控组装成形式多样的一维、二维宏观人工肌肉材料,以实现其性能从微观到宏观的传递。烯碳材料组装结构和微观形貌的差异,使其作为人工肌肉应用时,展现出不同的驱动形式及驱动性能。因此,本文基于烯碳材料人工肌肉的宏观表现形态,包含一维纤维和二维薄膜,讨论了烯碳材料在人工肌肉中的应用。在这一类人工肌肉中,烯碳材料除了作为结构、变形材料外,还可由于自身的电导性、电热转化和光热转化能力起到能量转化的作用,因此集响应、驱动、结构功能为一体。
1.1 纤维状烯碳人工肌肉
人工肌肉材料在外加刺激下发生的可逆体积形变,是其产生驱动行为的基础。通过客体材料(离子、水蒸气等)在烯碳纤维结构内部的可逆注入与排出,或者烯碳纤维内部客体材料受激的可逆膨胀与收缩,可制备具有膨胀/收缩形变的烯碳复合纤维人工肌肉。但当驱动行为仅来源于简单一维纤维结构的体积膨胀与收缩时,产生的形变量小,驱动效果差,难以满足复杂应用场景的需求。烯碳材料的组装和纤维制备技术的发展,催生了新型纤维状烯碳人工肌肉。烯碳纤维人工肌肉的运动形式取决于组装结构,而得益于特殊的组装结构,新型纤维状烯碳人工肌肉可将材料的体积膨胀与收缩扩展为更丰富的驱动形式(弯曲、旋转和伸缩驱动)并获得优异的驱动效果。
1.1.1 弯曲驱动的纤维状烯碳人工肌肉
具有大弯曲形变的弯曲驱动烯碳纤维人工肌肉,可以通过构筑纤维的不对称结构获得。例如曲良体教授团队用激光加工氧化石墨烯(GO)纤维,使得部分区域还原,构筑具有不对称结构的石墨烯/氧化石墨烯(G/GO)纤维(图1a,b)。石墨烯和氧化石墨烯片层上含氧官能团数量的差异,造成两者具有截然不同的亲疏水性能。因此当暴露在湿度环境下,纤维两侧表面形变量不一致,产生内部应力,纤维发生弯曲,即实现弯曲驱动(图1c–f)。不对称结构的设计是人工肌肉产生弯曲驱动的关键。对于纤维状人工肌肉而言,其弯曲驱动的研究并不多,学者更关注具有更高能量转换效率、功率密度的旋转和伸缩致动。
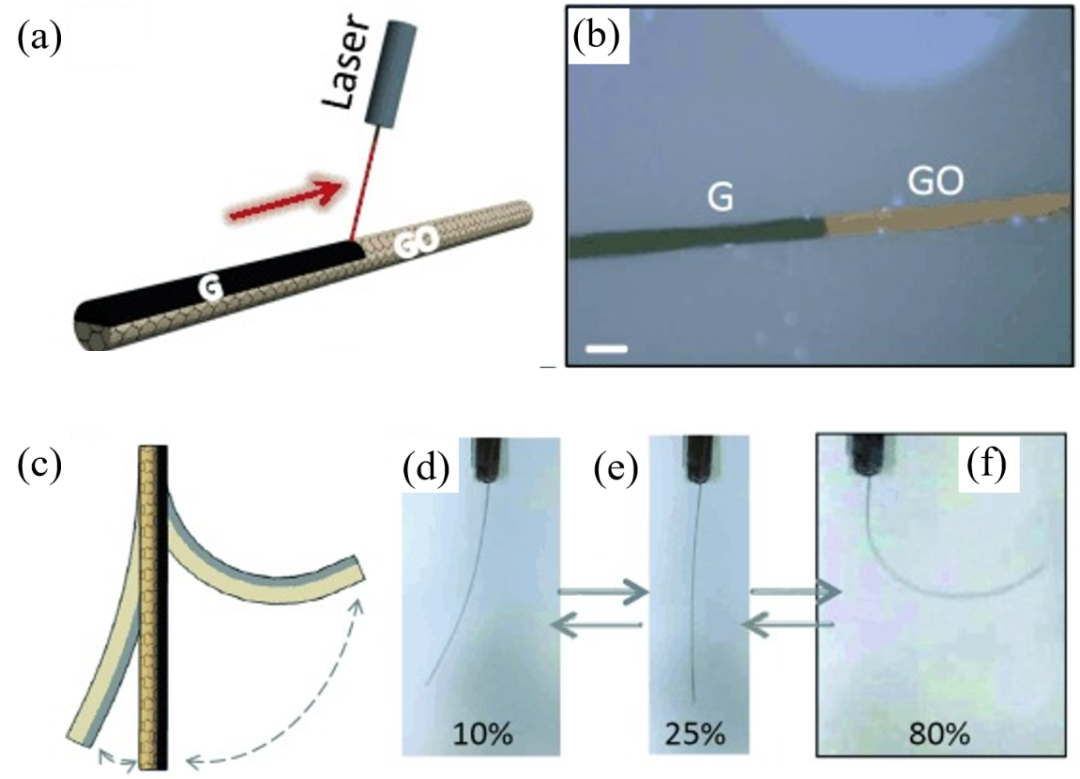
图1 弯曲驱动的烯碳纤维人工肌肉。(a) 利用激光处理法制备具有不对称结构的G/GO纤维;(b) G/GO纤维光镜图;(c) 纤维弯曲结构示意图;(d–f) 不同湿度下纤维弯曲驱动图片。
1.1.2 旋转驱动的纤维状烯碳人工肌肉
可用作旋转驱动器的纤维状烯碳人工肌肉由Baughman教授团队在2011年首次报道。对CNT纱线进行加捻,随着捻度增加,具有捻曲结构的CNT纱线内部产生扭矩,而纱线可通过体积变化实现内部扭矩的平衡。此时,解捻的过程使纤维结构发生变化,产生旋转驱动(图2a,b)。将扭曲的CNT纱线作为工作电极浸入电解液中,电解质离子和溶剂化物质在外加电压作用下,从电解液迁入CNT纱线内部引起纱线体积膨胀和结构解捻,驱使CNT纱线发生转动(图2c)。虽然这类加捻结构可产生良好的转动驱动效果,但收缩驱动量小。因此加捻结构一般用作旋转驱动器的结构设计中。
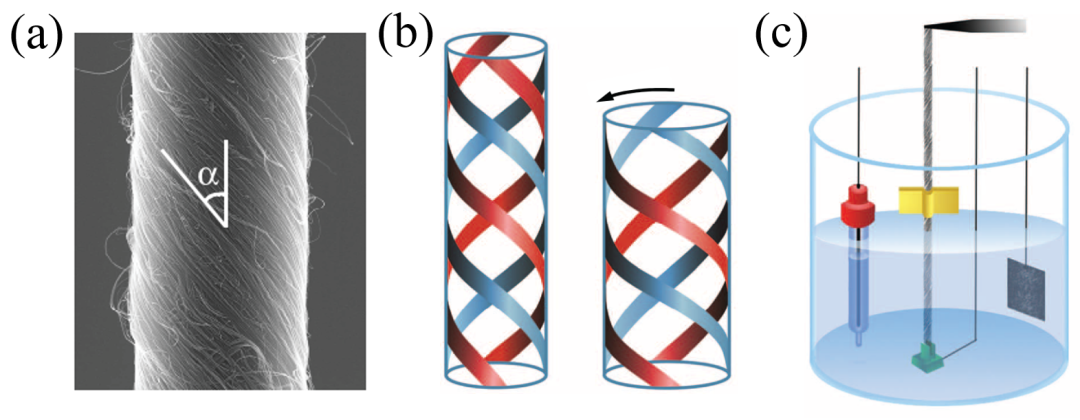
图2 旋转驱动的烯碳纤维人工肌肉。(a) CNT纱线的加捻结构;(b) 体积膨胀对纱线捻度和长度影响的示意图,箭头表示纱线的解捻方向;(c) 两端固定的CNT纱线人工肌肉构型示意图。
具有加捻结构烯碳纤维的转动驱动来源于纤维内部结构间隙扩大而产生的解捻,因此在设计具有加捻结构的纤维状人工肌肉时,可采用加捻的烯碳纤维为主体结构,利用其他能够在其结构间隙中可逆注入与脱除的分子(水、有机溶剂)作为外界刺激,实现可逆转动驱动,另一个途径则是以能够在外界刺激下发生可逆形变的材料为客体材料与加捻烯碳纤维复合,从而制备得到具有不同刺激响应的转动驱动人工肌肉。客体材料可扩展石蜡(热驱动)、聚丁二炔、聚乙二醇(电热驱动)、钯(氢气吸脱附驱动)、聚丙烯酸钠(近红外光驱动)、海藻酸钠(光驱动)、含酶的热响应水凝胶等材料,丰富了具有转动驱动人工肌肉纤维的应用场景,例如用作检测湿度、气体、生物分子的传感器。
1.1.3 伸缩驱动的纤维状烯碳人工肌肉
过度加捻的纤维可自发地形成螺旋结构(图3a),螺旋结构可进一步放大纺线在截面/体积变化下,引起的长度方向的形变,为通过体积变化实现大应变的伸缩驱动人工肌肉的制备提供了结构基础。顺着纤维扭转方向进一步过度扭曲得到的加捻螺旋线圈具有同手性结构,反之则为异手性结构。对于同手性结构的螺旋线圈,当内部产生解旋力矩时,螺旋线圈间距收缩变小,发生收缩变形;而异手性结构的螺旋线圈则发生伸长变形(图3b)。与旋转驱动纤维状人工肌肉类似,以烯碳材料为纤维主体材料,通过复合结构和客体材料的设计,可制备具有不同刺激源响应性(电化学驱动、溶剂吸脱附驱动、温差驱动)和优异伸缩驱动性能的纤维状人工肌肉。
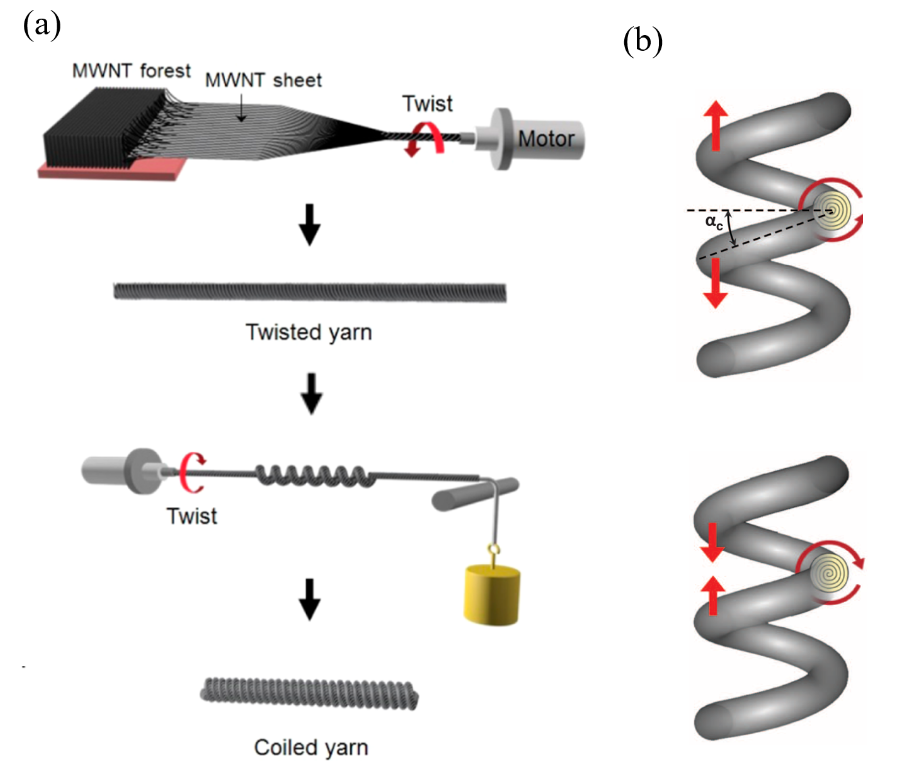
图3 伸缩驱动的螺旋结构纱线的制备与驱动。(a) 阵列纺丝法制备具有加捻结构和螺旋结构的CNT纱线示意图;(b) 异手性(上)和同手性(下)螺旋结构纱线伸缩驱动原理示意图。
1.2 薄膜状烯碳人工肌肉
二维薄膜材料的面内形变往往存在变形量小的问题,且长度/宽度方向形变的驱动方式在实际场景的应用有限。而对于薄膜材料的弯曲驱动,其驱动形式可设计、可编程,具有多样性。基于烯碳材料且具有不对称结构的二维薄膜,是一类受广泛关注及研究的弯曲驱动器。
通过构筑具有梯度/不对称化学结构的全烯碳材料薄膜、基于烯碳材料的异质双层膜,可制备得到薄膜状烯碳人工肌肉(图4)。得益于两层材料形变能力的显著差异,异质双层膜可获得更高的弯曲形变能力。对于异质双层结构的薄膜驱动器,双层膜间的界面相互作用强弱,决定了双层膜结构在反复弯曲驱动过程中的稳定性,材料的选择和界面设计是构筑双层膜结构驱动器中的关键问题。
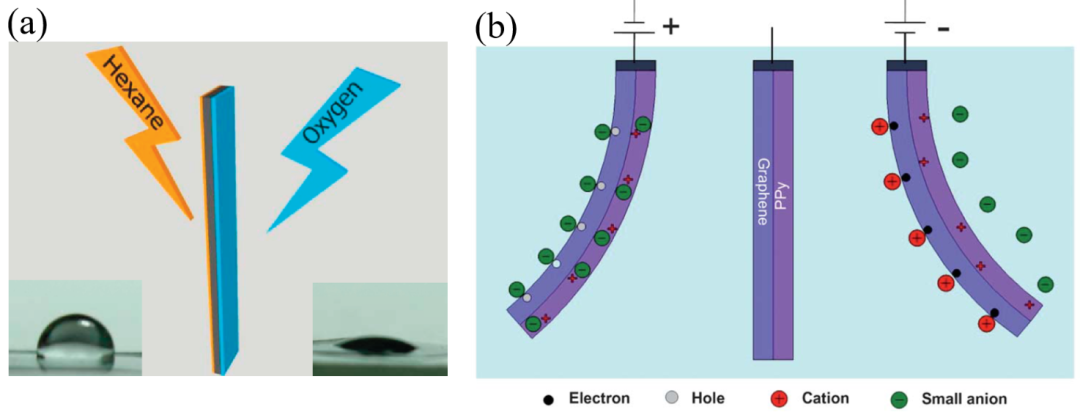
图4 基于烯碳材料的薄膜状人工肌肉。(a) 由正己烷和氧等离子处理后获得的具有不对称结构的石墨烯膜(两面亲疏水性存在差异);(b) 石墨烯/聚吡咯异质双层膜电化学驱动示意图。
烯碳材料的二维组装体薄膜,具有高电导率、柔性以及耐酸碱等优点,是一种良好的柔性集流体以及电极材料。基于离子聚合物-金属复合材料(IPMC)的人工肌肉具有三明治结构,其由膜状的离子聚合物骨架和镀在两侧表面的贵金属电极组成。传统的IPMC一般采用贵金属铂或者金作为电极,因此驱动器造价昂贵。金属在反复弯折后容易产生裂纹导致中间层的电解质泄露,降低了驱动器性能和使用寿命(图5a)。以烯碳薄膜代替IPMC中金属电极所制备的新型离子聚合物-烯碳复合材料,是一类结构稳定、性能优异的弯曲驱动器(图5b)。除了用于替换IPMC中的金属电极以外,烯碳薄膜也可用作驱动介电弹性体发生形变的电极材料。
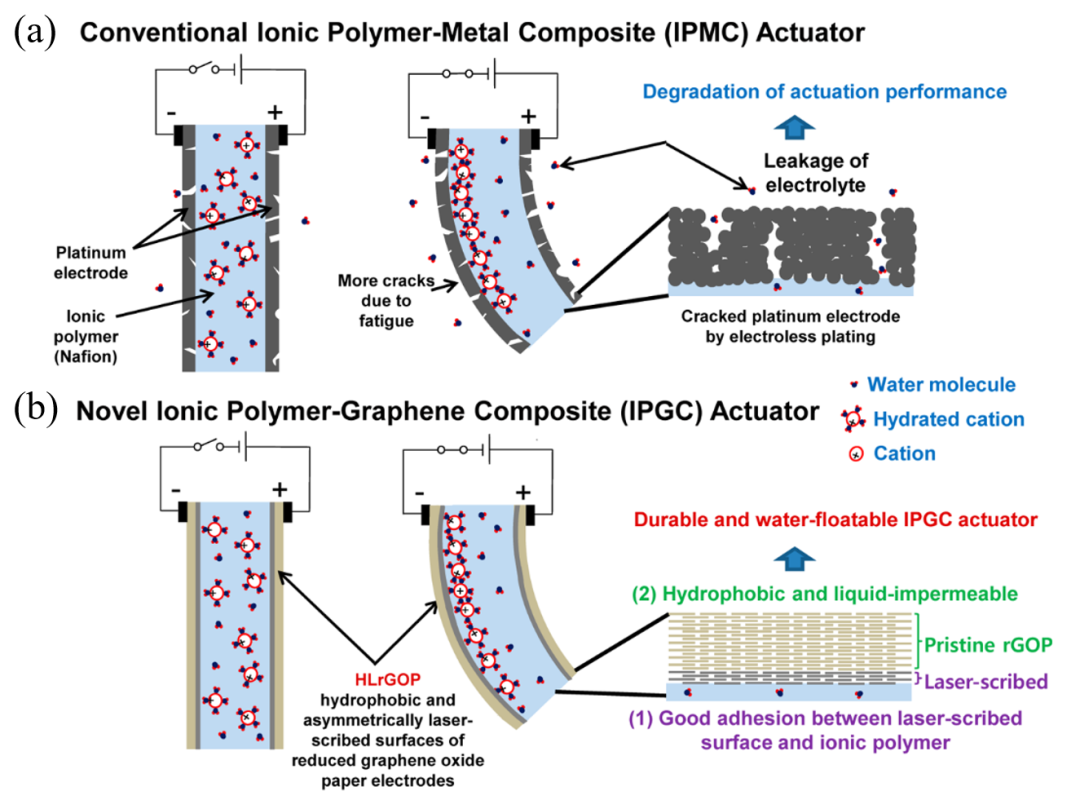
图5 (a) 离子聚合物-金属复合材料人工肌肉和(b) 离子聚合物-石墨烯复合材料人工肌肉结构示意图。
02 烯碳材料在人工肌肉中的复合功能化应用
烯碳材料由于具有高强度、高模量及高比表面积的特征,且可利用多种手段实现表面修饰从而为烯碳材料与其他材料提供更丰富的相互作用形式(离子键、氢键、π–π相互作用以及共价键等单一或多种协同作用)。因此,烯碳材料可用作复合材料中的增强相,通过提供与基体间的相互作用,耗散应力从而达到复合增强的目的。对于其他力学性能较弱的人工肌肉材料,可通过复合烯碳材料提高力学性能以获得稳定的驱动结构。此外,烯碳材料由于具有高导电性和光热、电热转化能力,复合了烯碳材料的人工肌肉,可由单一刺激源扩展为多重刺激响应。由于烯碳材料的可加工性,通过简单的方法即可实现其在刺激响应材料中的图案化,从而利用其产生局部刺激,最终实现人工肌肉可编程的响应形变(图6)。
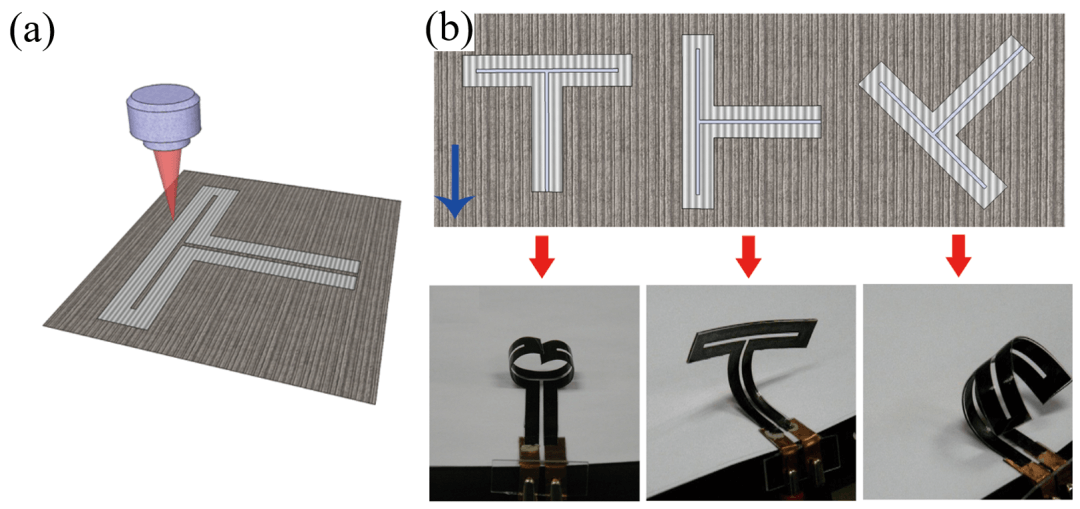
图6 具有可编程响应形变的人工肌肉。(a) 在巴基纸上进行平面设计和激光切割制作T型导电带示意图;(b) T型巴基纸电极的三种不同加工方式及相应的驱动行为。
对于柔性和人工智能机器人而言,装配准确的具有实施运动感知能力的肌肉材料,对其实现对环境的自主响应具有重要意义。因此开发集驱动和传感一体的人工肌肉是该领域的必然趋势。人工肌肉的驱动过程总是伴随着体积的变化,若该形变可改变其中烯碳材料构建的导电网络通路,在恒压电源下,由于烯碳材料电阻的变化,材料可输出不同的电流信号。因此烯碳材料还可在人工肌肉中起到传感的功能(图7)。
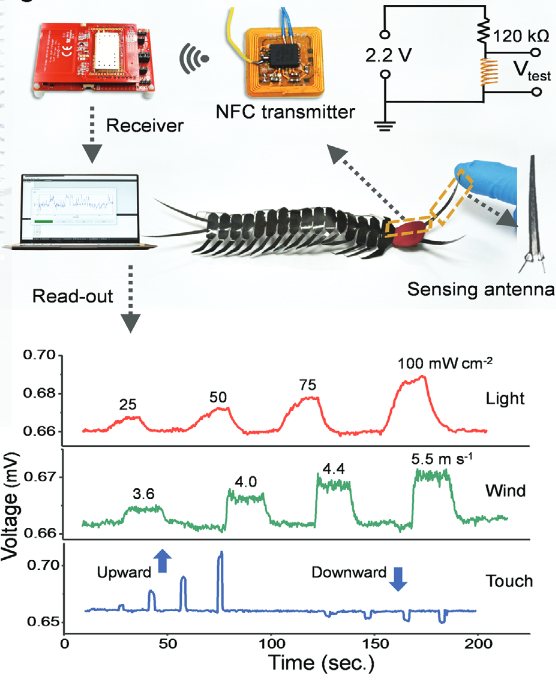
图7 可感应光照强度、风速和触摸的光驱动机器人(智能光响应性薄膜由铁电体聚偏氟乙烯、光热聚多巴胺还原氧化石墨烯以及中间层导电性石墨-碳纳米管复合材料构成)。
结论与展望
烯碳材料在人工肌肉领域的应用,概括而言均是从其独特的理化特性出发,作为人工肌肉中的结构、功能性材料的应用。虽然烯碳材料在人工肌肉领域的应用已获得了长足的发展,并取得了诸多优异的性能。但其中仍存在诸如烯碳材料原料成本高,人工肌肉能量转换效率低、输出力小,匹配人工肌肉的智能系统尚未完善等亟待解决的问题。人工肌肉的真正应用,需要化学、材料、机械工程和信息科学等领域知识的互相交叉融合,在实际的装配与应用中发现问题,从而对材料设计提出新要求,以催生人工肌肉材料的新发展。
诸如柔性外骨骼、仿真机器人、变翼飞行器等未来先进智能驱动系统的发展,要求人工肌肉除了单一的致动功能外,还需要兼具轻质、柔性等结构特征,并且集传感、信号传输、控制等功能于一体,这进一步激发了多功能驱动的需求。从烯碳材料的结构与性能出发,探索全新的组装方式,开发具有高效驱动性能的组装结构,匹配各异的驱动方式与复合材料以寻求最优解,并结合烯碳材料的功能特性,有望设计具有结构-功能-智能一体化的人工肌肉。
参考文献及原文链接
温烨烨, 任明, 邸江涛, 张锦. 烯碳材料在人工肌肉领域的应用进展. 物理化学学报, 2022, 38 (9), 2107006. doi: 10.3866/PKU.WHXB202107006
Wen, Y. Y.; Ren, M.; Di, J. T.; Zhang, J. Application of Carbonene Materials for Artificial Muscles. Acta Phys. -Chim. Sin., 2022, 38 (9), 2107006. doi: 10.3866/PKU.WHXB202107006
http://www.whxb.pku.edu.cn/CN/10.3866/PKU.WHXB202107006
通讯作者

张锦 院士
中国科学院院士、北京大学教授、博士生导师/国家杰出青年基金获得者、教育部长江学者特聘教授、英国皇家化学学会会士、中组部“万人计划”创新领军人才入选者、科技部重点研发计划项目负责人。1997年获兰州大学理学博士学位,1998年至2000年在英国利兹大学从事博士后研究,2000年5月到北京大学工作。主要从事纳米碳材料、烯碳纤维的控制制备与纳米碳材料的拉曼光谱学研究。
本文来自物理化学学报WHXB,本文观点不代表石墨烯网立场,转载请联系原作者。