触觉传感器在医疗监测、人机交互和物联网等领域具有广泛应用前景,但传统传感器往往缺乏柔性或空间分辨率不足。本研究突破性地开发了一种完全柔性的磁触觉传感器,通过集成石墨烯基霍尔传感器阵列和垂直周期性磁化的磁膜,实现了高空间分辨率检测。传感器模仿人体皮肤结构,具备高灵敏度、低滞后和优异线性度,为可穿戴设备和软体机器人提供了新技术方案,显著提升了触觉感知的精确性和适应性。
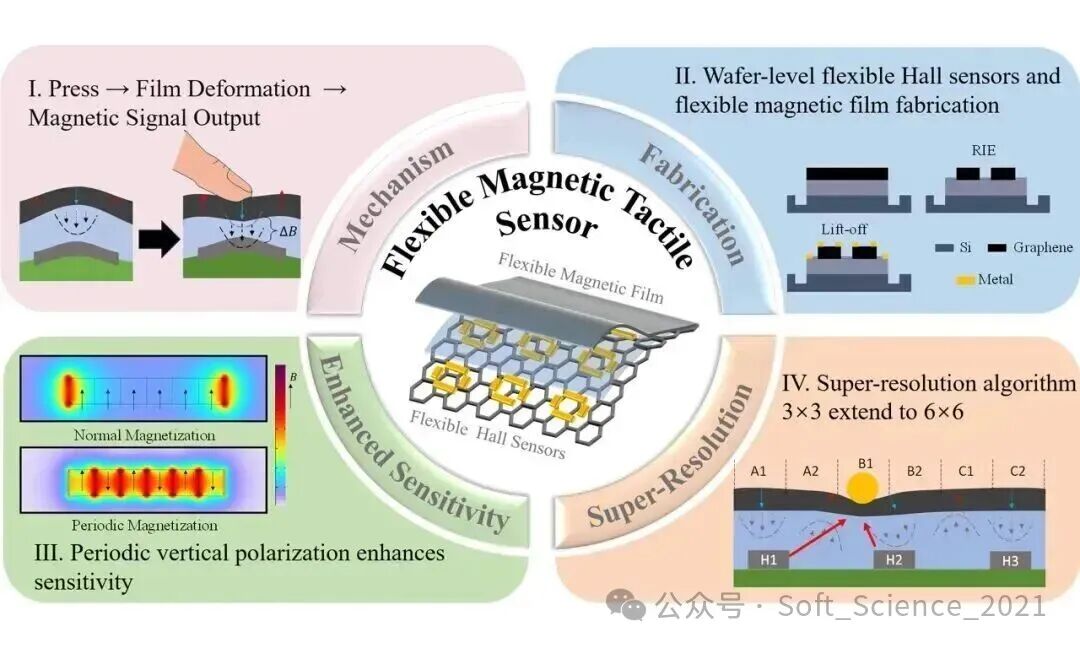

触觉传感器作为人机交互的核心部件,其柔性和分辨率直接影响应用效果。传统磁触觉传感器多采用刚性霍尔元件,限制了在弯曲表面的集成。本研究首次基于石墨烯材料实现了完全柔性传感器,结合垂直周期性磁化技术,解决了柔性与高分辨率之间的平衡难题。
传感器设计模仿人体皮肤的多层结构(如图1所示),包括顶部周期性磁化磁膜、中间弹性层和底部石墨烯霍尔传感器阵列。石墨烯的高载流子迁移率和机械柔性确保了传感器的灵敏度和耐用性,而聚乙烯terephthalate(PET)基底则提供了良好的透明性和化学稳定性。
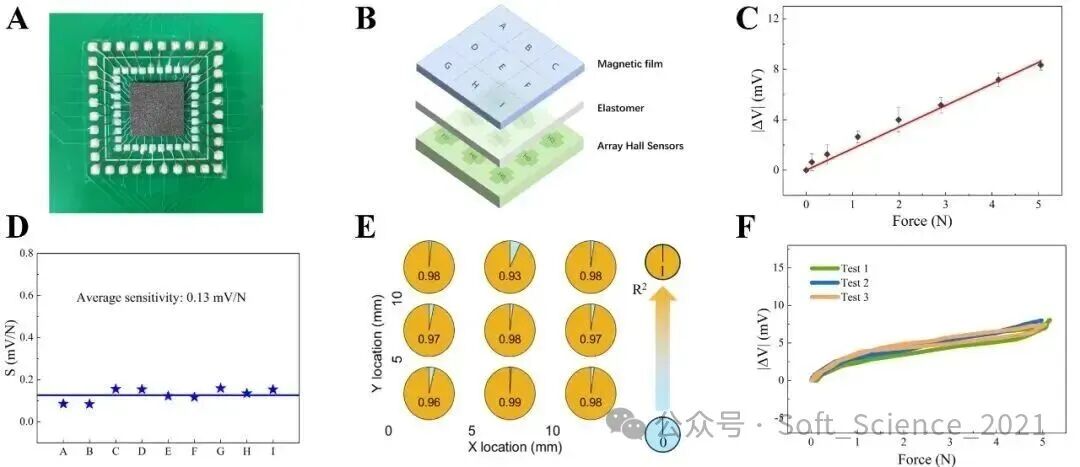
图1 (a)触觉传感器封装效果。(b)3×3按压位置示意图。(c)施加压力后的输出响应。(d)灵敏度对比。(e)传感器线性度。(f)传感器滞后性测试。
霍尔传感器采用3×3阵列布局(图2(a)),每个单元优化了长宽比(L/W=0.4)以最大化灵敏度。测试显示,阵列一致性高,平均灵敏度2.946%/T,最小可检测磁场38.29μT/√Hz,为高精度检测奠定基础。
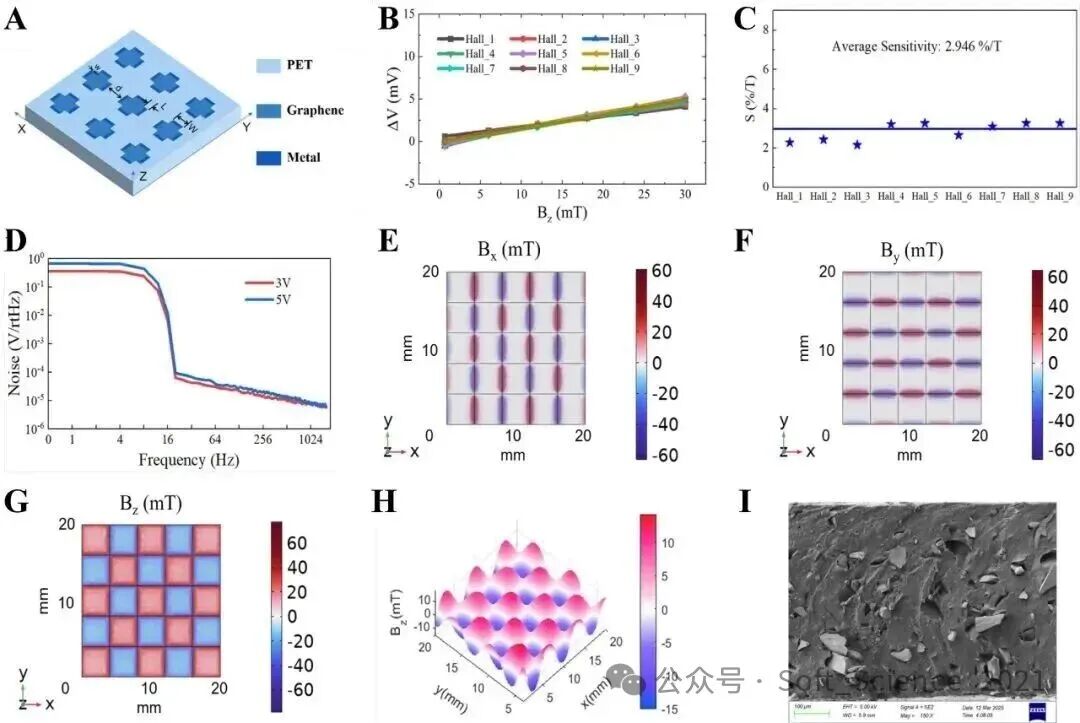
图2 霍尔传感器与磁膜设计。(a)柔性霍尔传感器结构。(b)霍尔传感器输出响应。(c)九个霍尔传感器的灵敏度对比。(d)霍尔传感器噪声测试。(e)-(g)垂直周期性磁化磁膜在x、y、z轴磁场的仿真结果。(h)垂直周期性磁化磁膜z轴磁场的实测结果。(i)磁膜的扫描电子显微镜(SEM)图像。
磁膜的设计是本传感器实现高精度触觉感知的核心创新之一。研究团队摒弃了传统的均匀磁化方案,采用了垂直周期性磁化这一先进技术。该技术以8毫米为周期,在柔性磁膜上制备出交替排列的微型N极和S极磁畴阵列。这种设计的核心优势在于,它能够有效约束磁力线的分布,将磁场主要导向垂直方向(Z轴),从而显著抑制了不必要的横向(X、Y轴)磁场扩散与干扰。如图2(e)-(h)所示的仿真与实测结果清晰地表明,周期性磁化结构在磁膜表面形成了高度集中且规律分布的磁通密度区域,为下方的霍尔传感器阵列提供了强烈且局域化的检测信号。
为进一步优化性能,团队对磁膜的关键参数进行了系统研究。最终优化的磁膜厚度为1毫米,其中钕铁硼(NdFeB)磁性颗粒的质量分数为60%。这一配比在确保高磁性能与良好柔性之间取得了最佳平衡。量化测试结果显示,在磁膜的单个磁畴(N极和S极)中心正下方,可分别产生高达10.65 mT和11.74 mT的垂直表面磁通密度。相较于传统均匀磁化薄膜,这种周期性磁化结构不仅增强了局域信号强度,还有效降低了不同感应单元之间的串扰,为传感器实现高灵敏度和高空间分辨率奠定了至关重要的物理基础。
空间识别能力通过分析霍尔传感器输出模式实现。初始3×3阵列可准确识别按压位置(图3(c)底层),进一步将每个区域细分为4个子区域,形成6×6网格(图3(c)顶层)。通过阈值判断和邻域信号分析,传感器实现了超分辨率定位,平均定位误差仅1.37 mm(图3(g))。这一创新将空间分辨率提升了一倍,为精细操作提供了可能。
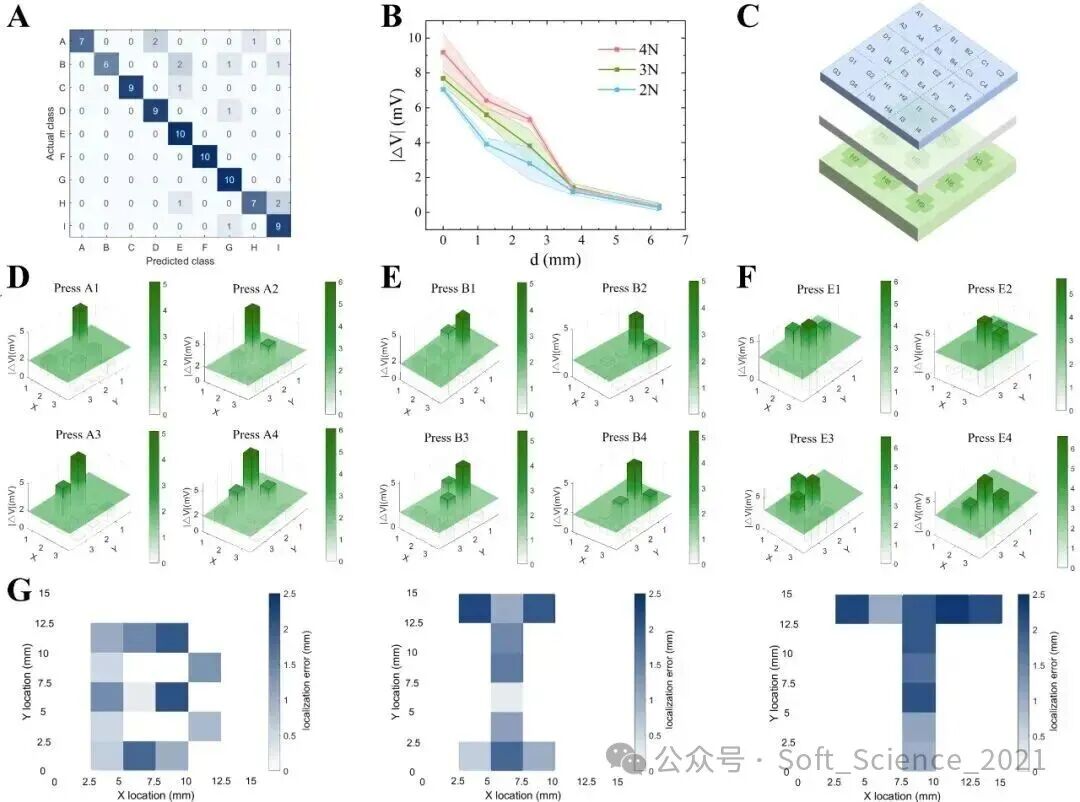
图3高分辨率位置感知。(a)3×3位置识别验证。(b)按压力度与输出电压的关系。(c)6×6网格划分。(d)按下A1-A4时的输出比较。(e)按下B1-B4时的输出比较。(f)按下E1-E4时的输出比较。(g)6×6位置识别验证。
本研究成功开发了全柔性磁触觉传感器,通过石墨烯和周期性磁化技术实现了高空间分辨率与机械柔性的统一。传感器在灵敏度、线性度和滞后率方面表现优异,未来可应用于智能机器人抓取、医疗假肢感知和可穿戴健康监测等领域。进一步工作可探索大规模阵列集成和人工智能算法优化,以提升多触点识别能力,推动柔性电子技术迈向实用化。
通讯作者
王晓毅,现任北京理工大学集成电路与电子学院教授。其主要研究方向为CMOS-MEMS单片集成人工智能传感器,结合人工智能技术实现物理/化学信息的感知、存储、处理与分析,具体涵盖结构健康监测传感器、环境感知枢纽、气体传感器阵列、电力传感单元等。同时,他还专注于微纳制造技术、柔性电子、集成微系统及其在工业、智能家居和医疗健康等领域的应用。已在JSSC、IEEE TIE、JMEMS、IEEE TIM、IEEE TED、Microsystems and Nanoengineering、ACS AMI、npj flexible electronics 等国际期刊及IEEE MEMS会议、TRANSDUCERS等会议发表论文50余篇。
申亚京,现任香港科技大学电子于计算工程系教授,智能制造中心主任。他的研究聚焦于机器人技术及其应用,特别是在生物医学工程和人机交互领域。已在顶级跨学科期刊(如Science Robotics、Science Advance、Nature Communications、PNAS)、权威专业期刊(如IEEE Trans on Robotics)及重要国际会议(如ICRA、IROS)上发表论文200余篇,研究成果获美联社、路透社、中央电视台等国际媒体广泛报道。他曾担任机器人领域旗舰期刊IEEE Trans on Robotics 的副编辑(2019-2022)。曾获IEEE机器人与自动化国际会议最佳操作论文奖、IEEE机器人与自动化学会日本分会青年奖、MARSS大会Big-on-Small奖、香港教资会早期职业研究奖、国家优秀青年科学基金(港澳)项目、香港青年创业科学家等多项荣誉。
基金支持
国家自然科学基金(62304023)、北京市自然科学基金(4252062)、国家重点研发计划(2023YFB3507300)。
引用信息
Li, X.; Gao, W.; Wang, B.; Jiao, W.; Su, H.; Zhou, W.; Xie, H.; Shen, Y.; Wang, X. Graphene-based flexible magnetic tactile sensor with vertically periodic magnetization for enhanced spatial resolution. Soft Sci. 2025, 5, 58. https://dx.doi.org/10.20517/ss.2025.56
Graphene-based flexible magnetic tactile sensor with vertically periodic magnetization for enhanced spatial resolution
Xuejiao Li#, Wenwei Gao#, Biyan Wang, Wenlong Jiao, Hong Su, Wenbiao Zhou, Huikai Xie, Yajing Shen*, Xiaoyi Wang*
第一作者:李雪娇、高文伟
通讯作者:王晓毅、申亚京
通讯单位:北京理工大学、香港科技大学
全文链接:https://www.oaepublish.com/articles/ss.2025.56
本文来自SoftScience,本文观点不代表石墨烯网立场,转载请联系原作者。