磁活性材料能在磁场作用下改变形状,在柔性机器人、生物医学设备和可变形结构领域具有巨大应用潜力。然而现有系统常存在制造工艺复杂、几何定制性受限及磁化重编程策略效率低等问题,尤其在三维结构中更为突出。本文,加拿大麦吉尔大学Marta Cerruti、Abdolhamid Akbarzadeh等在《ADVANCED SCIENCE》期刊发表名为“Multifunctional and Reprogrammable Magnetoactive Graphene Oxide Origami”的论文,研究提出一种轻质磁性氧化石墨烯(MGO)双层薄膜,其内嵌硬磁性微粒,可在磁驱动下实现快速、精准且稳定的形态转变,甚至适用于水环境。
MGO薄膜的纸张特性使得通过切割、折叠和组装等后处理步骤,能够低成本、简便地制造定制化结构。此外,氧化石墨烯的吸湿特性引入了湿度可调驱动机制,提供了额外的控制维度。为解决重编程难题,本研究提出基于可重复使用MGO磁性贴片的可逆、高通量、节能策略,实现了多模态磁致变形重构与多功能性。其应用涵盖原位力学状态转换、序列逻辑计算及软体机器人运动。最终演示的MGO感控器件兼具磁致驱动与实时变形监测能力,为闭环软体机器人系统奠定基础。本研究提出可持续、可重构且多功能的策略,推动新一代智能磁性软体机器的发展。
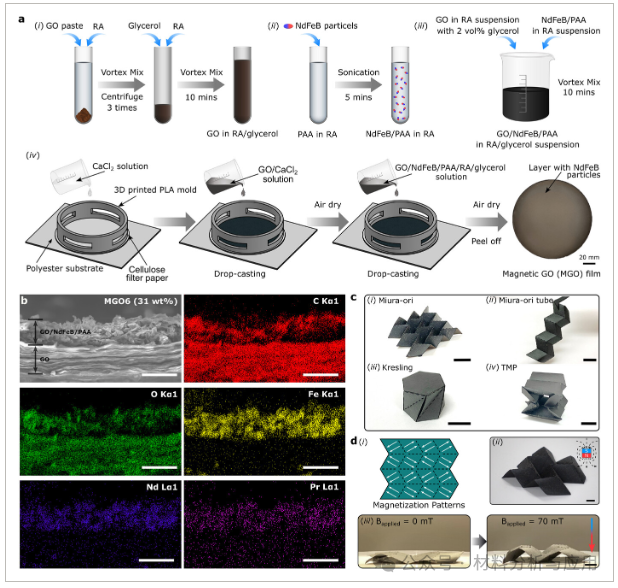

图1、磁性氧化石墨烯薄膜的制备和表征。
综上所述,开发的MGO薄膜代表了响应材料领域的重大进步。通过将硬磁微粒集成到 GO 基板中,轻质 MGO 薄膜表现出一系列功能特性,包括磁驱动的快速形状变形、精确的远程控制结构重新配置以及用于可控磁驱动形状变化的磁化重新编程。这些能力与材料在各种环境条件下(包括水)的稳定性相辅相成。此外,MGO薄膜的简单性和适应性有助于高效按需创建复杂的可重构架构,并具有针对特定应用要求量身定制的可编程磁化分布。重新编程磁化模式的能力可以在部署的系统中实现实时形状变形和多种功能的集成。这些特性使 MGO 薄膜具有很强的适应性,适合各种应用。此外,磁致动和应变传感在MGO传感执行器中的集成建立了一类新的自传感执行器,为自适应软机器人系统的闭环控制铺平了道路。
文献:https://doi.org/10.1002/advs.202514597
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。