
研究背景
基于仿生学的具有多自由度和通信能力的软体机器人近年来受到广泛关注。然而,由于目前多自由度运动软体机器人的研究主要集中在复杂的驱动模式上,在应用方面变现并不出色。在这项工作中,来自东南大学的Han lei等研究人员提出了一种集成通信模块的无线束约束的多向运动光驱动软体爬行机器人,这种软体机器人可以在固定近红外(NIR)光源照射的情况下在四个方向上移动,并且还能够实现定位和感知。这项研究利用了氧化石墨烯(GO)的光热变形响应以及非对称的驱动足结构设计,研究人员只需控制近红外光的持续时间即可确定机器人变形,从而实现不同方向的爬行。此外,该机器人中集成了通信模块,使机器人能够通过磁耦合来定位和感知湿度。该项研究以《A Multidirectional Locomotion Light-Driven Soft Crawling Robot》为题发表在Advanced Functional Materials期刊上,链接:https://doi.org/10.1002/adfm.202305046。
文章概述
氧化石墨烯作为石墨烯家族的重要成员,是在石墨烯边缘或表面引入多种氧化官能团形成的一种二维片层结构的材料。由于氧化石墨烯含有大量的亲水性含氧官能团,能够可逆性结合水分子,对湿度、光、温度等多种刺激可以产生响应行为,是制备智能驱动器的优秀材料。为了制备形变可控的氧化石墨烯驱动器,通常需要对氧化石墨烯膜进行精确性图案化修饰,使驱动器局部形成双层或多层结构。
图文导读
在本研究里,机器人采用了氧化石墨烯作为驱动材料。图1展示了由单个固定近红外光源驱动的多向运动软爬行机器人结构及其制备过程。机器人结构由两个交叉垂直堆叠的双向驱动器组成,每个双向驱动器包含一个基体和两个不对称的驱动足。机器人的工作原理是通过光或热来驱动粘贴有氧化石墨烯的驱动足,而将两只驱动足设计成非对称结构可以产生摩擦力差,从而使得机器人产生定向运动。此外研究人员通过测量氧化石墨烯薄膜的傅里叶变换红外光谱以确认含氧官能团的存在,这证明了氧化石墨烯具有良好的亲水性。
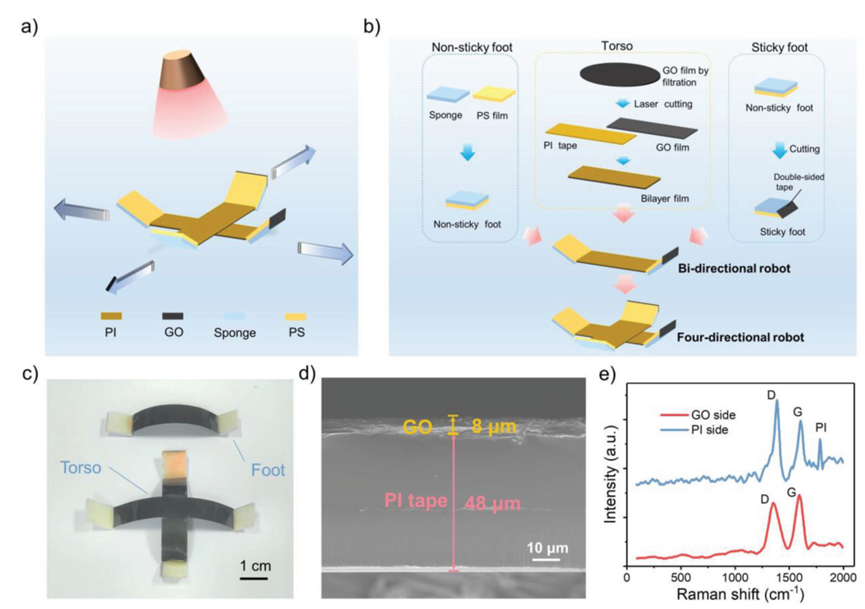

图1.光驱动机器人的结构及其制备。
随后,研究人员对驱动模块的结构进行了设计,配置了磁场并且测试了这种材料的动态特性。并且通过仿真和实验比较了磁场特性对于软体机器人的变形影响。
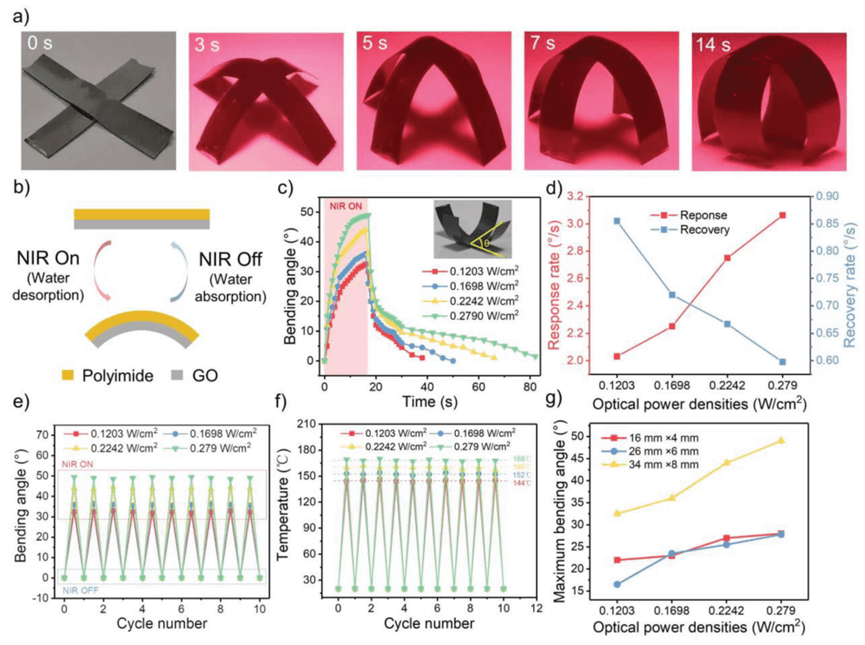
图2.近红外光激励下的机器人的动态特性。a)双层驱动器变形图像。b)驱动器的光驱动机制。c)不同光功率密度下驱动器的弯曲角度与近红外光持续时间的曲线 d)不同光功率密度下机器人躯干的响应率和恢复率。e)最大弯曲角度和f)最大表面温度的重复性测试。g)不同光功率密度下机器人躯干的最大弯曲角度。
前面实验验证了该驱动器具有优异的双向弯曲性能。因此研究人员随后开展了机器人的多自由度实验研究,通过控制激励光的持续时间来控制机器人的运动,并且实时监测了其温度变化。
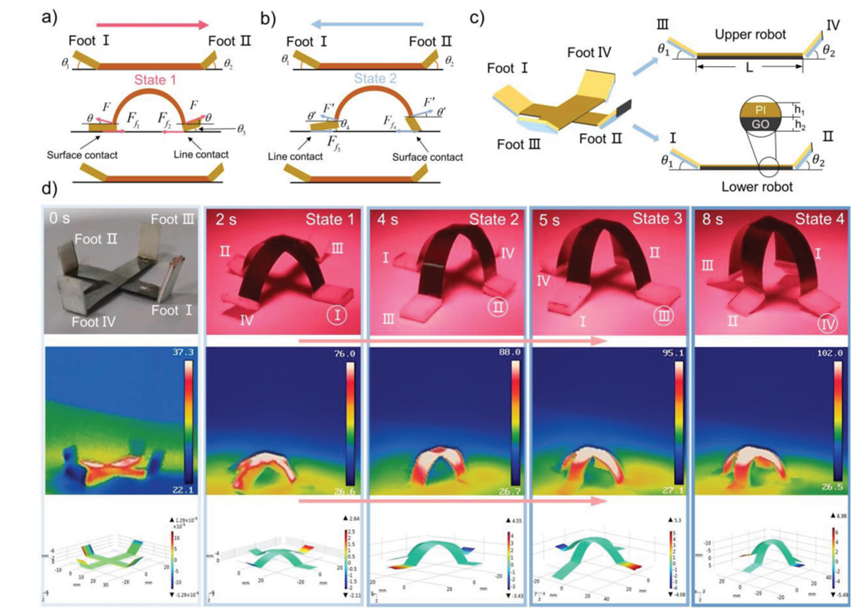
图3.软体爬行机器人的多向运动。a)向右和 b) 向左运动运动机制。c)多自由度软体爬行机器人的组成。d)近红外光下多自由度软爬行机器人在四种临界状态的光学图像、热分析图和瞬态仿真结果。

图4. 多自由度软体爬行机器人在四个方向上的运动。a)方向脚的定义。b)机器人以指定的方向脚 I、II、III和IV分别在起始点在四个方向上进行单个循环的运动。c)达到四个临界状态的时间。d) 机器人四个方向(前、后、左、右)运动的俯视图。
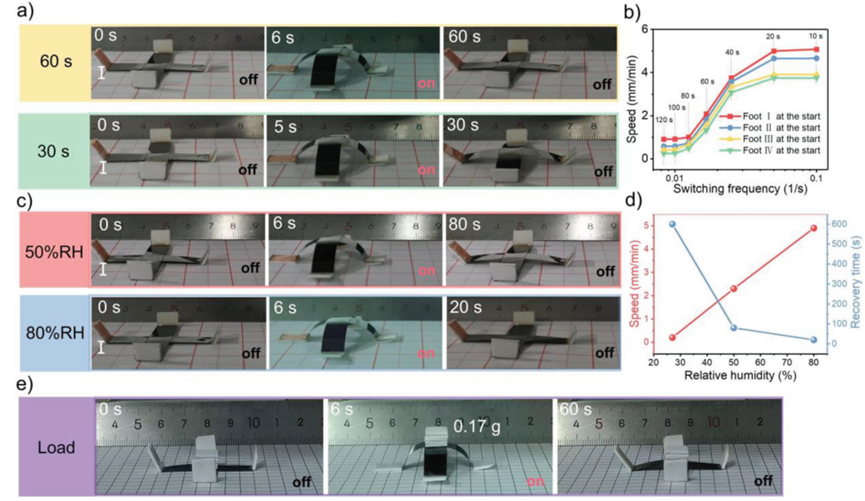
图5.多自由度软体爬行机器人运动效率的增强。a)机器人在近红外光不同切换周期下的运动。b)机器人运动速度随近红外光切换频率(周期)的变化曲线。c)机器人在不同环境湿度下的运动 d)不同环境湿度下的运动速度和恢复时间。e) 机器人带载运动。
除了要实现多自由度运动外,机器人还需要具备通信、感知等功能。因此研究人员构建了一个额外的通信模块(螺旋电感器/氧化石墨烯薄膜结构)并将其连接到机器人上,作为用于感知的谐振器和用于同时传输的天线。只有机器人经过的地方才能观察到清晰的共振峰。结合线圈阵列的布置,可以实现机器人的连续定位和跟踪。
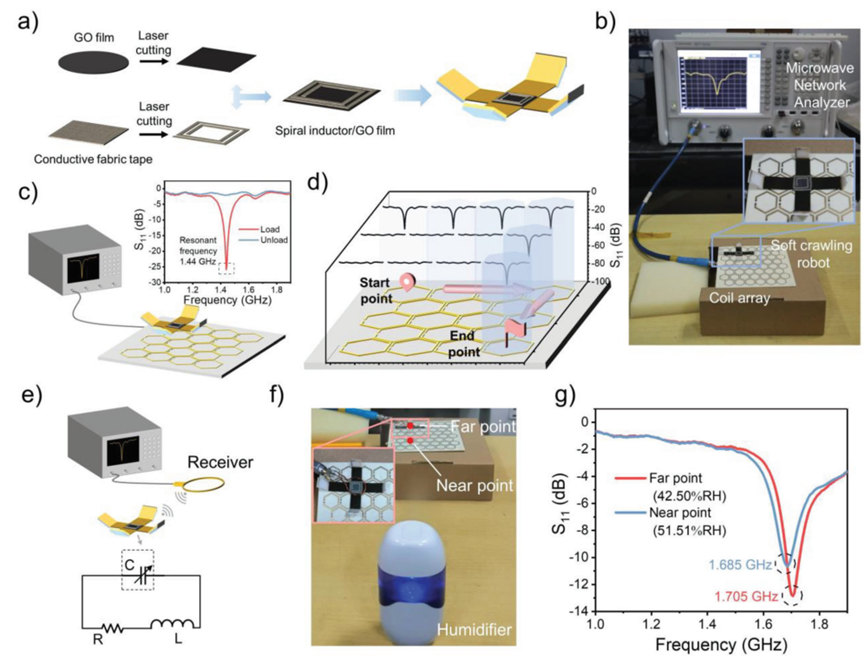
图6.多自由度软体爬行机器人的定位和湿度传感。a)通信模块制备示意图b)搭建的测试系统,c)由线圈阵列和微波网络分析仪组成的机器人位置监测示意图。插图反映了接收器获得的反射系数信息。d) 机器人定位和运动轨迹监控图 e)机器人无线湿度传感原理图和电路模型。f)为湿度传感而构建的测试系统。g)加湿器远点和近点测量的反射系数曲线。
结论
综上所述,研究人员在这项工作中展示了一种集通信和感知于一体的多向运动光驱动软爬行机器人,并且对机器人足部与地面的角度和躯干尺寸进行了非对称结构设计,以实现四足和地面的交替接触来实现驱动。研究人员通过调整近红外光照射时间,使机器人达到特定的临界状态并沿指定方向爬行。而提高近红外切换频率和环境湿度可以有效提高机器人的运动效率。
此外,螺旋电感氧化石墨烯薄膜结构作为通信模块集成到机器人中,使其能够通过磁耦合进行通信,同时充当位置、轨迹跟踪和湿度传感模块。总的来说,研究人员这项工作为多向软爬行机器人提供了一种简单而有前途的设计策略,并且有潜力成为灵活的通信和感知平台。同时,随着光响应驱动器相关领域的研究越发深入,新的材料与方法的不断发现给了研究人员新的动力,相信光响应驱动器可以为碳基驱动器的制备和仿生行为模拟应用提供参考。
本文来自纳米发电机,本文观点不代表石墨烯网立场,转载请联系原作者。