
时隔不到一月,再发顶刊。继三月所发 Nature 论文成果首次实现亚 1 纳米栅长晶体管之后,清华大学集成电路学院任天令教授团队,结合多年深耕石墨烯研究的基础,着眼于当下正火的元宇宙,研发出一款可集成眼动交互和触觉感知的协同界面,实现了快速准确的 3D 人机交互。
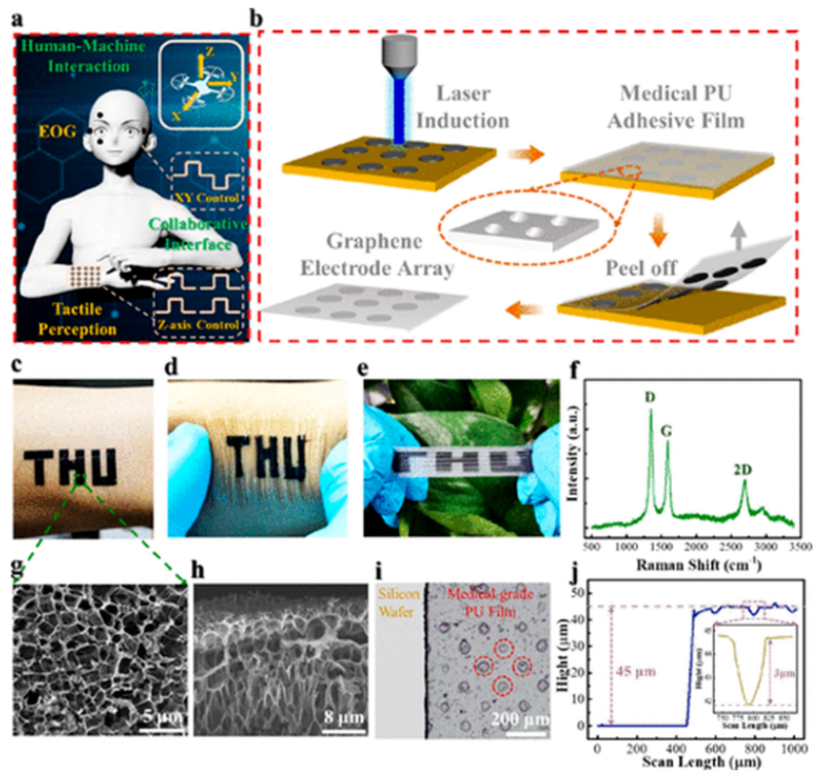

图 | 集成眼动交互和触觉感知的协同界面(来源:ACS Nano)
这款触觉感知界面的厚度仅为 90μm,拉伸应变可达 1000%。在 0-300Pa 的小压力范围内,其触觉感知界面的感知单位、也就是触觉传感器的灵敏度,可达 1.428kPa-¹。
根据触觉传感器像素点的信号时序,该界面可以实现方向控制,比如上、下、左、右等。在辅助眼电信号交互实现三维人机交互方面,该触觉感知界面具有巨大潜力。
“坦率来讲,我们目前(不仅)提出了眼电信号与触觉感知协同的人机交互界面,并且已经完成交互界面器件的制备和实验验证。”任天令表示。

图 | 任天令(来源:任天令)
4 月 6 日,相关论文以《三维人机交互的眼电与触觉协同界面》(Electrooculography and Tactile Perception Collaborative Interface for 3D Human–Machine Interaction)为题发表在 ACS Nano 上 [1]。
图 | 相关论文(来源:ACS Nano)
用最简单的结构,实现最理想的效果
在具体研究细节上,由于该团队此前已具备蜂窝状石墨烯的大规模制备技术,并对其转移技术做了较多探索。因此,最初他们设计并实现了诸多复杂型转移技术,比如静电纺丝、无衬底纹身式等,也曾取得不少成果。
后来,他们想到既然石墨烯本身就是通过机械剥离法发现的,为何不采用这样简单的转移方式来达到实验效果?这里需要考虑到的是可穿戴式的电极和触觉感知界面的透气性、柔性和可拉伸性,因此他们采用医用透气性柔性聚氨酯薄膜作为转移和器件制备的基础。
由于聚氨酯薄膜的柔软性和延展性较好,弹性模量较低,因此在转移过程存在巨大挑战,这很容易导致转移后的柔性聚氨酯薄膜发生较大变形,并致使蜂窝状石墨烯电极阵列的损坏。
后来,该团队设法将其解决,目前已能实现阵列化蜂窝状石墨烯的转移,并且转移后的石墨烯仍呈现出完美的蜂窝状结构,不仅没有发生破损,柔性聚氨酯薄膜也没有任何变形。
攻克转移技术难题之后,接下来面临的问题在于如何制备可穿戴式的触觉感知阵列?期间,该团队曾尝试过使用不同介质层,来调节触觉传感器的性能。
几经尝试之后,他们打算用最简单的结构,实现最理想的效果:即通过两层蜂窝状石墨烯阵列的堆叠,去实现触觉传感器的制备,让柔性聚氨酯薄膜发挥最大作用和价值,也就是让下层柔性聚氨酯薄膜作为介质层。
由于柔性聚氨酯薄膜的弹性模量较低、受压变形能力则比较强,因此能为触觉传感器提供较高的灵敏度和较大输出信号幅度,同时由于其具有较高粘附性,可直接作为与皮肤贴附的粘附层,保证其与皮肤贴附的透气性和舒适性。
与此同时,在下层柔性聚氨酯薄膜的粘附层和整个触觉感知阵列之间,上层的柔性聚氨酯薄膜还承担着封装层作用。
从石墨烯到人机交互界面
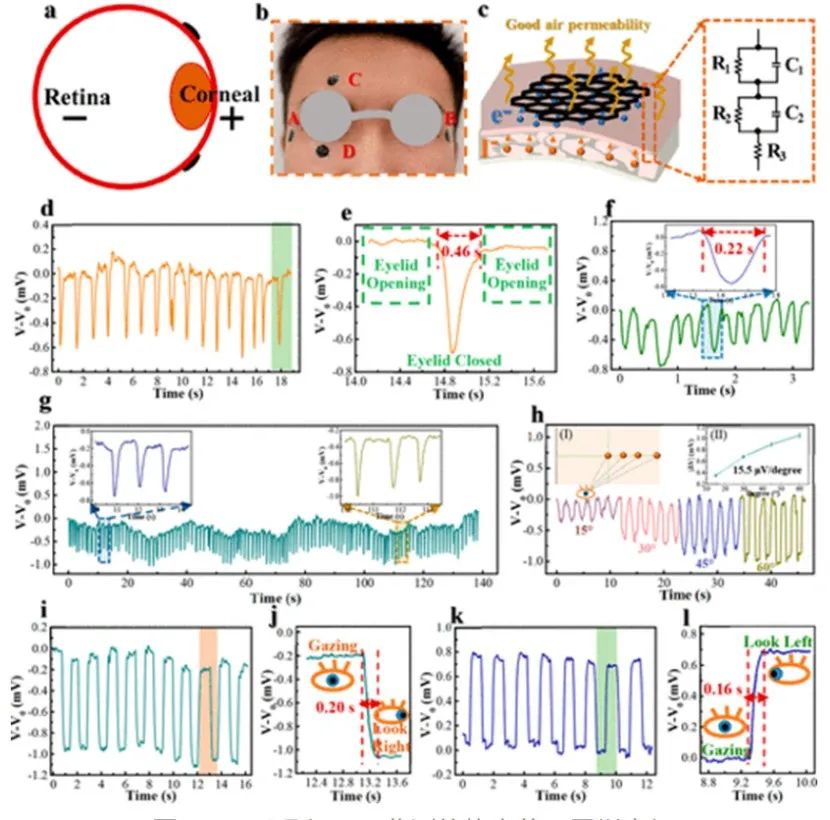
另据悉,使用设备时需要收集眼电图。之所以这样做,是因为尽管脑电信号的获取成本低、可重复,但存在空间分辨率低、信噪比差的问题;而肌电信号是许多肌肉纤维中运动单元动作电位在时间和空间上的叠加,通常需要在肌肉中插入电极针来记录电位的变化,这很容易受到噪声串扰的影响,同时侵入式的电极会给人体带来创伤;而眼电信号的采集则更简单,信号可重复性高、信噪比也比较高,同时成本低廉。
此外,选择采集眼电图作为人机交互界面的另一个原因在于,该团队想通过眼球的运动实现无接触式、快速和便捷的沉浸式人机交互。特别是对于存在运动障碍或肌肉障碍的人群来说,利用眼球运动来实现交互控制更具实际意义。
眼睛周围的皮肤较为娇嫩和敏感,那么作为眼电信号信号感知层的关键部分——电极材料应该满足三点要求:一是轻便和柔性可拉伸;二是电极-皮肤界面阻抗要尽量小且具有长期性能稳定性;三是电极具有长效贴附的稳定性和对皮肤友好,而现有的 Ag/AgCl 凝胶电极或金属电极均无法满足以上要求。

(来源:ACS Nano)
因此,该团队开发出蜂窝状石墨烯电极作为感知层,由于石墨烯和皮肤之间的直接接触,离子(I−) 和电子(e−) 在石墨烯电极和皮肤之间的界面上直接交换,没有离子浓度的衰减,这确保了电极-皮肤的低阻抗性。
相比传统的金属电极,结合柔性聚氨酯的蜂窝状石墨烯电极材料,具有超高的柔性和可拉伸性,拉伸应变范围可高达 1000%,并且此次采用的是基于医疗级的超薄柔性聚氨酯薄膜,本身具有高度透气性、贴附性和生物兼容性,这让电极材料与皮肤实现了完全的共形贴合,具有抗运动的长效贴附稳定性,再加上微米级孔径的蜂窝状石墨烯,电极具有优异的透气性和舒适性。
这也是使用化学气相沉积法制备的石墨烯传感器所不具备的优势,使用该方法制备的石墨烯往往不具备可拉伸性,且在制备更复杂、更昂贵,性能差异也更显著。而该团队基于激光诱导工艺制备的蜂窝状石墨烯,可直接实现图形化定制,再结合机械剥离转移的工艺,让电极的制备更加容易,并让该团队最终实现了大规模阵列化制备。
转动眼球即可控制轮椅的前后左右移动
目前已有的头戴式 VR 设备,主要提供视觉和听觉效果体验,而其交互设备主要依靠手持控制器。VR 属于新一代信息技术的集大成者,在硬件上除了终端之外,还需要空间定位、手势交互、眼动追踪、语音交互等一系列感知交互技术,在核心配件上则需要光学器件、显示屏、芯片、传感器等,所需要的技术十分复杂。
事实上,在收集眼电信号之后,该界面可以实现快速、便捷、非接触的二维人机交互,例如控制四轴飞行器的上、下、左、右运动。然而,面对其在三维空间的飞行或复杂的飞行轨迹控制,眼电信号信号的交互控制在精度和维度上都有局限性。
因此,任天令团队才有了开发这款辅助界面的想法,以便实现精确可控的三维人机交互,为了实现操作上的合理性,他们想到通过可穿戴的触觉感知界面,去实现视觉和触觉协同交互的三维人机交互界面。
其中,眼电信号交互界面主要用于快速、便捷、非接触的 2D(XY 轴)交互,触觉感知界面则主要用于复杂的 2D 运动控制和 3D 人机交互中的 Z 轴控制。
(来源:ACS Nano)
在应用前景上,由于眼电信号界面和触觉感知界面均是柔性可穿戴的,因此它们在协同作用之后,可以提供虚拟世界的三维空间定位和便携式交互,让人们告别手持笨重的交互控制器,并可通过眼电信号信号实现精准的眼动追踪,在解放双手的同时还可自由体验视、听、触觉沉浸式虚拟世界的真实感受。
在现实世界中,也可作为人和机器的交互界面。比如,对于运动障碍人士来说,可让其通过眼球的运动,去实现控制轮椅的前、后、左、右移动。总而言之,这款人机协同界面可给虚拟世界和现实世界提供自由无束缚、沉浸式的人机交互体验。
日后,该团队将在当前研究基础上去开展具体的应用,他们将进一步提高眼电信号交互界面和触觉感知界面的交互分辨率,并将设计眼电信号信号与触觉感知界面信号的专用采集和无线传输电路,以期充分发挥视觉与触觉的协同作用,再结合 VR 视觉设备,最终有望实现在虚拟空间中的三维人机交互的实际应用。
当头戴式的 VR 设备被智能隐形眼镜替代,我们在体验沉浸式的虚拟世界时,感受也会更真实更自由,还有望通过控制眼球运动去浏览各种信息、以及执行简单的交互,更有望通过可穿戴触觉感知辅助界面实现便携式精准交互。
-End-
参考:
1、Xu, J., Li, X., Chang, H., Zhao, B., Tan, X., Yang, Y., … & Ren, T. L. (2022). Electrooculography and Tactile Perception Collaborative Interface for 3D Human–Machine Interaction. ACS nano.
本文来自DeepTech深科技,本文观点不代表石墨烯网立场,转载请联系原作者。