本文,烟台大学Bentao Zou、杨文广 教授等在《Chemical Engineering Science》期刊发表名为“Photothermal-driven BOPP/GO bilayer actuators for programmable 3D shaping and amphibious robot”的论文,研究从阳光响应植物的光向性运动特性中汲取灵感,提出了一种由聚丙烯(BOPP)和氧化石墨烯(GO)组成的双层致动器的制备与表征方案,利用GO的光热转换特性以及BOPP与GO之间的热膨胀系数差异。实验结果表明,当GO质量分数为23.53%时可实现最佳光热驱动性能,最大弯曲角度达70°,响应时间仅1.2秒,并具备优异的循环稳定性。
通过空间控制BOPP薄膜并采用激光直接书写技术,实现了可编程的二维到三维结构转变,包括箱形和立方体构型。基于这些致动器构建的多功能机器人系统展现出多样化能力:抓取/提升机器人可承载自身四倍重量;仿生软体机器人通过躯干弯曲实现陆地行走;两栖机器人融合马兰戈尼效应,可在陆地(BOPP/GO热驱动)与水域(近红外诱导表面张力梯度)间无缝切换运动模式。本研究为柔性机器人领域的光响应系统奠定了理论与实验基础,为复杂环境中的智能机器人提供了创新设计策略。
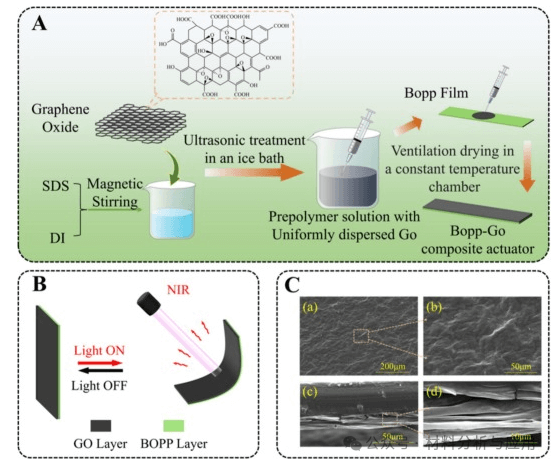

图1.(A)BOPP/GO双层执行器的制备工艺流程。(B)近红外光刺激下的驱动机制示意图。(C)BOPP/GO执行器的扫描电镜表征。(a,b)GO表面的扫描电子显微镜图像。(c,d)BOPP/GO 执行器横截面的扫描电子显微镜图像。
本研究通过系统探究光响应行为与可编程变形机制,确立了BOPP/GO双层致动器的基本原理。含23.53%质量分数GO的致动器在15 W/cm²近红外照射下表现出最佳性能,响应时间内可实现70°弯曲角度,循环后性能衰减<5%,证实其卓越可靠性。通过空间梯度BOPP胶带结构与激光直接刻写GO图案,实现了可编程的二维到三维变形(盒状/立方体结构),在25℃环境下保持率达92%。多功能机器人系统通过四项关键演示验证实用价值:四爪夹具可提升0.2705克负载(相当于自身重量的4倍);六杆升降器呈现负载与提升高度的反比关系;仿生软体机器人通过躯干弯曲实现前后足1.5毫米位移;马兰戈尼效应两栖机器人实现陆水无缝转换。同步温度-变形监测实验验证了光热-力学耦合机制,为柔性机器人领域的光致驱动系统建立了理论与实验相结合的综合框架,为复杂环境提供了创新的跨领域解决方案。
文献:https://doi.org/10.1016/j.ces.2025.122693
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。