
成果简介
小型软体机器人具有栩栩如生的复杂行为,可以在艰险的地形和狭窄的空间中航行。然而,软体机器人技术面临的主要挑战是:1)创建能够快速、可逆地从 22D 到 3D 形状变形且刚度可调的致动器;2)提高致动力和鲁棒性,以实现更广泛的应用;3)设计整体系统,以实现实际场景中的无绳操纵和灵活多模态。本文,曼彻斯特大学Tim J. Echtermeyer等研究人员在《Small》期刊发表名为“A Graphene-Mica-Based Photo-Thermal Actuator for Small-Scale Soft Robots”的论文,研究介绍了具有多种功能的机械顺应纸质机器人。这些机器人以光热激活聚合物双态致动器为基础,其中的石墨烯用于能量的光热转换,而具有高杨氏模量的云母则提供了所需的刚度。
光能转化为热能会导致热膨胀和应力不匹配结构的弯曲。致动器是根据修改后的季莫申科模型设计的,并利用数值模拟评估了它们的致动性能。薄膜可用于光驱动的可编程形状变形。局部控制允许在膜的任意位置实施主动铰链。集成到批量生产的小型软体机器人中后,膜可促进机器人的运动、滚动和翻转。此外,还展示了抓和踢机制,凸显了此类致动器在未来应用中的潜力。
图文导读
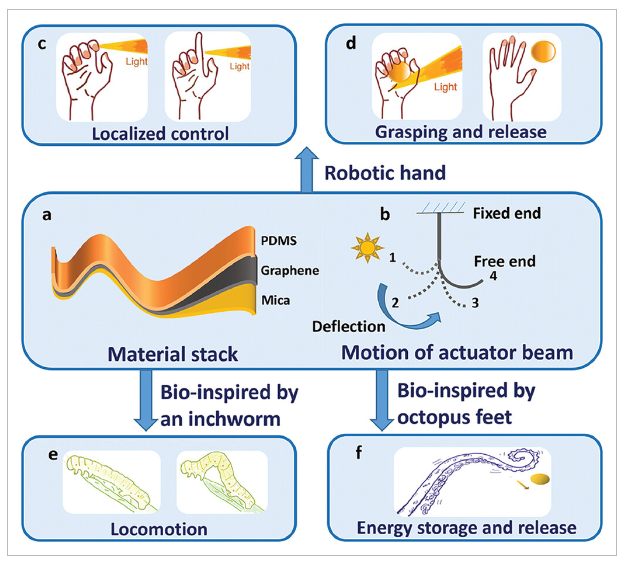

图1、执行器的结构设计和多功能应用。
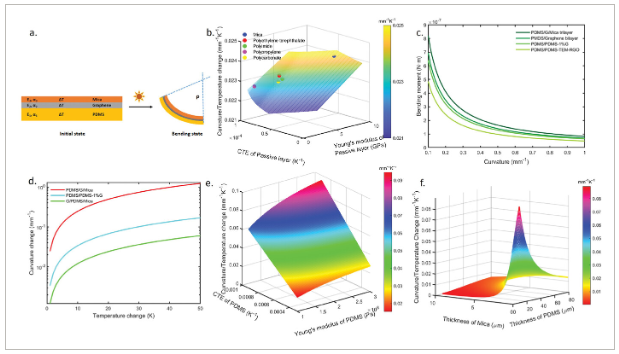
图2、材料与驱动机理的理论研究
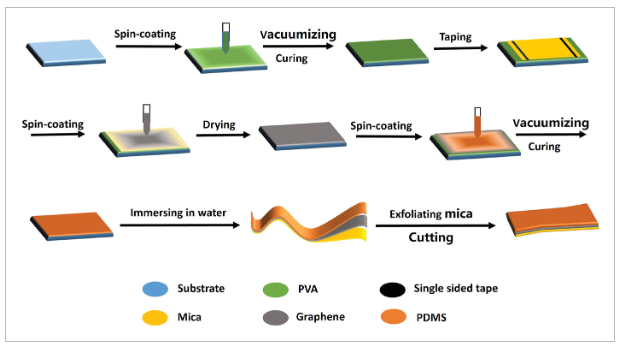
图3、PDMS/G/云母三层膜的制造工艺。
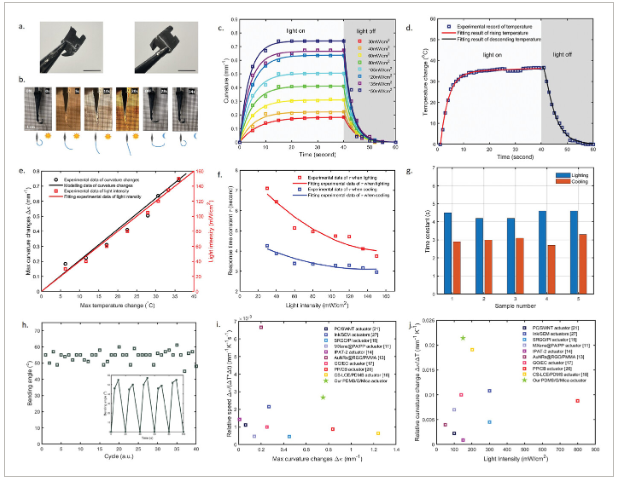
图4、PDMS/G/Mica 执行器的驱动性能
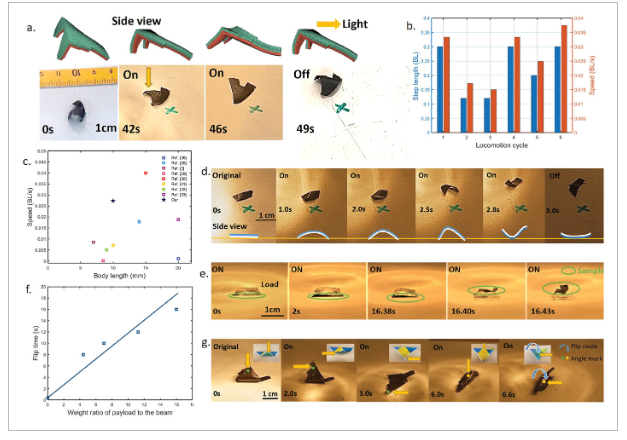
图5、演示基于PDMS/G/Mica膜的软体机器人的各种运动策略和承载能力
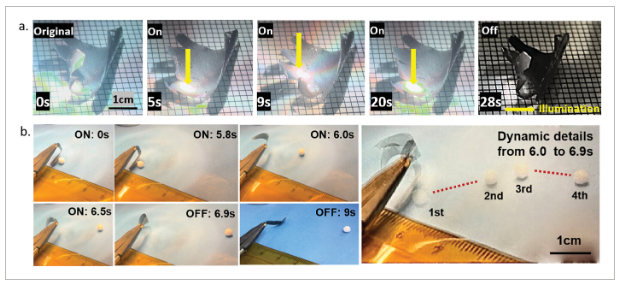
图6、a) 模拟人手手指弯曲的光敏手的光学图像。单个手指由局部照明控制,黄色箭头代表照明位置。b) PDMS/G/云母执行器
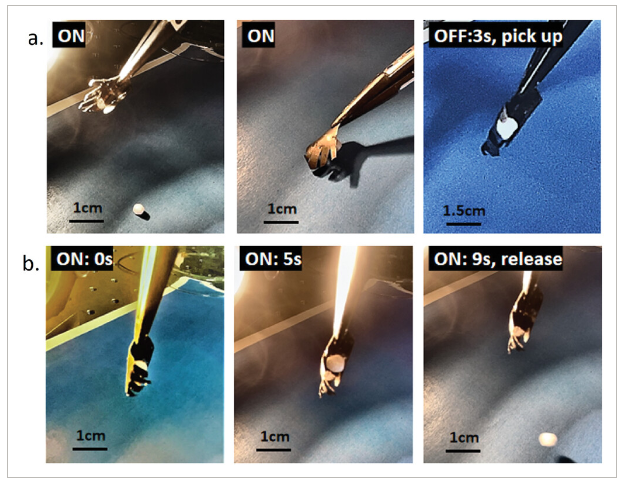
图7、机械手 a) 拾取和 b) 握住和放开物品。
小结
在这里,我们展示了一种由 PDMS/G/Mica 膜批量生产的光响应型多功能毫米级软致动器。研究提出了一个理论模型来评估光热致动器的行为,从而为设计过程提供便利。推导出的 PDMS/G/Mica 致动器在150mWcm-2 的中等光照强度下,可在7秒内实现约0.6mm-1的曲率变化,具有响应速度快、偏转大的特点。变形是可逆的,曲率变化的平均速度为0.08mm-1s-1。此外,PDMS/G/云母致动器能够承受高机械负荷和应力而不会失效,并能承载超过自身重量 18 倍的有效载荷。
会上还展示了各种结合了光响应膜的软机器人结构,展示了不同的运动机制、空间局部弯曲、能量存储和释放以及负载能力。PDMS/G/Mica 执行器的制造工艺简单、成本低、可扩展,非常适合光控微型软机器人应用,尤其是需要更复杂控制的应用。
文献:https://doi.org/10.1002/smll.20231100
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。