
运动传感器是许多电子系统的重要组成部分。然而,在软电子学领域中,基于无疲劳软检测质量的惯性运动传感器的开发还没有被广泛地探索。无毒的镓基液态金属是一种新兴的材料,表现出诱人的机电特性,使其成为惯性传感器的优秀检测质量材料。在这里,我们提出并演示了一种完全软的激光诱导石墨烯(LIG)和基于液态金属的惯性传感器,集成了温度、湿度和呼吸传感器。惯性传感器设计将涂有石墨烯的液态金属液滴限制在流体通道内,在LIG电阻电极上滚动。所提出的传感器结构和材料实现了高度可移动的检测质量和用于其振荡的振动空间。该惯性传感器具有6.52% m–1s2的高灵敏度和出色的可重复性(超过12500个周期)。该平台使用可扩展的快速激光写入技术制造,并与可编程片上系统(PSoC)集成,作为独立系统运行,用于实时无线监控运动模式和控制机械臂。开发的印刷惯性平台是下一代可穿戴运动跟踪平台和软人机界面的绝佳候选。
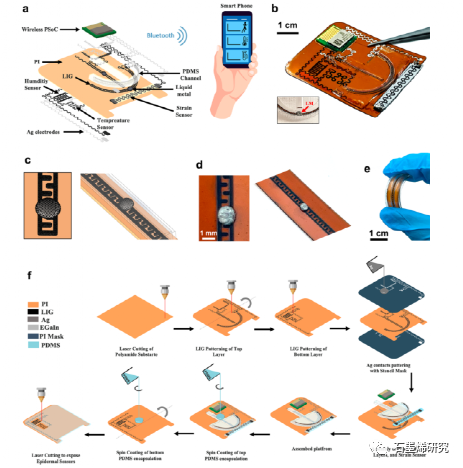

图1. 多功能LIG平台的概念图、分解图、照片和制作。(a)多功能无线平台的概念图,显示了包含惯性、温度、湿度和呼吸传感器的平台不同组成层的分解图。(b)制造的多功能平台的光学照片;插图显示放置在弯曲的图案化PDMS通道内的LM。(c和d)所制造的激光诱导石墨烯交叉指型电阻电极和位于其上的石墨烯涂覆的液态金属液滴的3D示意图和光学照片。(e)具有PDMS通道的制造的LIG衬底的照片。(f)制造开发的多功能平台所遵循的工艺流程。
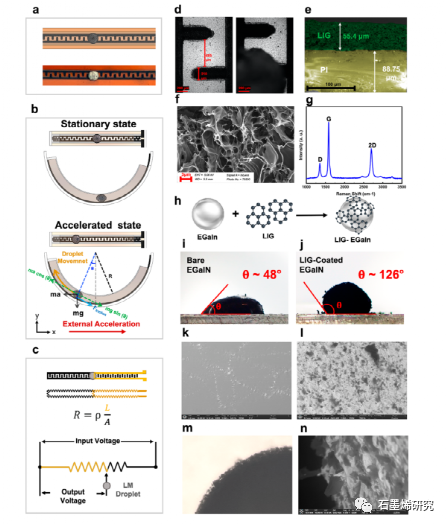
图2. 液滴动力学和材料特性。(a)电阻LIG电极的俯视图。(b)提议的惯性液态金属基传感器的侧视示意图,显示了LM检验质量块在静止和加速状态下的位置,以及在施加加速度时作用于其上的力。(c)显示电阻传感器的操作机制和可变电阻器LM液滴启动概念的等效电路及其相应测量设置的示意图。(d)顶部显微图像显示了LIG电阻电极的数字和位于其上的LM液滴。(e)横截面扫描电子显微镜(SEM)图像,显示了在辐照过的聚酰胺膜的顶部产生的多孔LIG网络。(f)显示生成的石墨烯薄片的高倍俯视SEM图像。(g)拉曼光谱LIG电极获得473 nm波长的激光。(h)显示产生LIG涂覆的EGaIn液滴的涂覆过程的示意图。(I和j)在PDMS基底上制作的裸和涂LIG的EGaIn的接触角。(k和l)环境SEM (ESEM)顶部图像显示了裸露的和LIG涂覆的EGaIn液滴的表面。(m)涂有光的LM检验质量的显微图像,显示了涂覆液滴液体核心的巢状石墨烯结构。(n)涂有LIG的LM的高倍ESEM图像,显示石墨烯薄片粘附到LM的天然氧化物层上。(o)通过控制led的强度和作为LM微滴位置的函数的电极的相应电阻变化,使LM激活的可变电阻器概念可视化的时间推移顺序图像。

图3. 基于液态金属的惯性传感器角色塑造。(a 和 b)通过控制 LED 的强度和电极的相应电阻变化作为 LM 液滴位置的函数,可视化 LM 启用的可变电阻概念的时间推移序列图像。(c) LM 型惯性电阻传感器循环滚动试验的输出。(d)惯性传感器的电阻变化输出相对于参考加速度计的输出随机应用运动。(e)当沿 x 和 y 方向分别施加加速度时,组装的两轴传感器的输出。(f-h)惯性传感器在轴加速度下的电阻变化输出随0.5 -2赫兹加速度频率的变化。(i)输出电阻随加速度的变化。
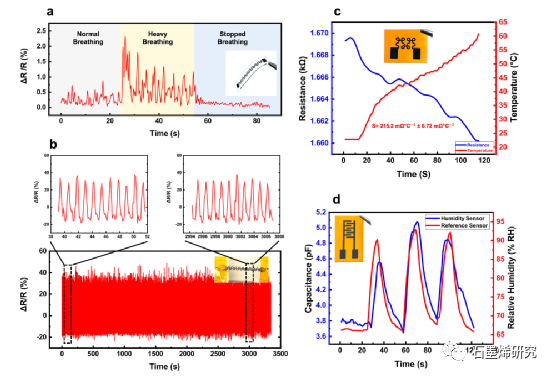
图4. 多功能石墨烯-平台角色塑造。(a)应变传感器连接到人体皮肤时测量呼吸模式的实时响应。(b)应变传感器在6.5% 应变电阻拉伸下的循环试验响应。(c) LIG 温度传感器的电阻与环境温度的角色塑造图。(d)角色塑造湿度传感器的电容与相对湿度图(当暴露于人体呼吸的交替间隔时间时)。

图5. 平台系统集成和应用。(a)集成信号处理和实时无线传输功能的可穿戴多功能平台的系统框图。(b和c)实时身体活动监测,其示出了当附着到执行诸如静止站立、行走、慢跑、躺下和起床等任务的人类对象的胸部时,传感器的电阻变化的原始输出。(d和e)实时身体活动监测,显示了当附着在执行原地行走、小运动、向前行走和扭转等运动的腿式机器人的背部时,传感器的电阻变化的原始输出。(f)所开发的基于LM的惯性传感器在软人机界面中的应用示意图。(g)使用开发的惯性传感器拍摄的机械臂控制的连续延时照片。
相关科研成果由阿卜杜拉国王科技大学Wedyan Babatain和Muhammad Mustafa Hussain等人于2022年发表在ACS Nano(https://doi.org/10.1021/acsnano.2c06180)上。原文:Graphene and Liquid Metal Integrated Multifunctional Wearable Platform for Monitoring Motion and Human–Machine Interfacing。
本文来自石墨烯研究,本文观点不代表石墨烯网立场,转载请联系原作者。